Table of Content
The internet of things enables the digitalization of physical objects and business operations by embedding sensors, microcontrollers, actuators, and other components to objects (things) by converting analog information to digital data and adding connectivity and software applications (run code).
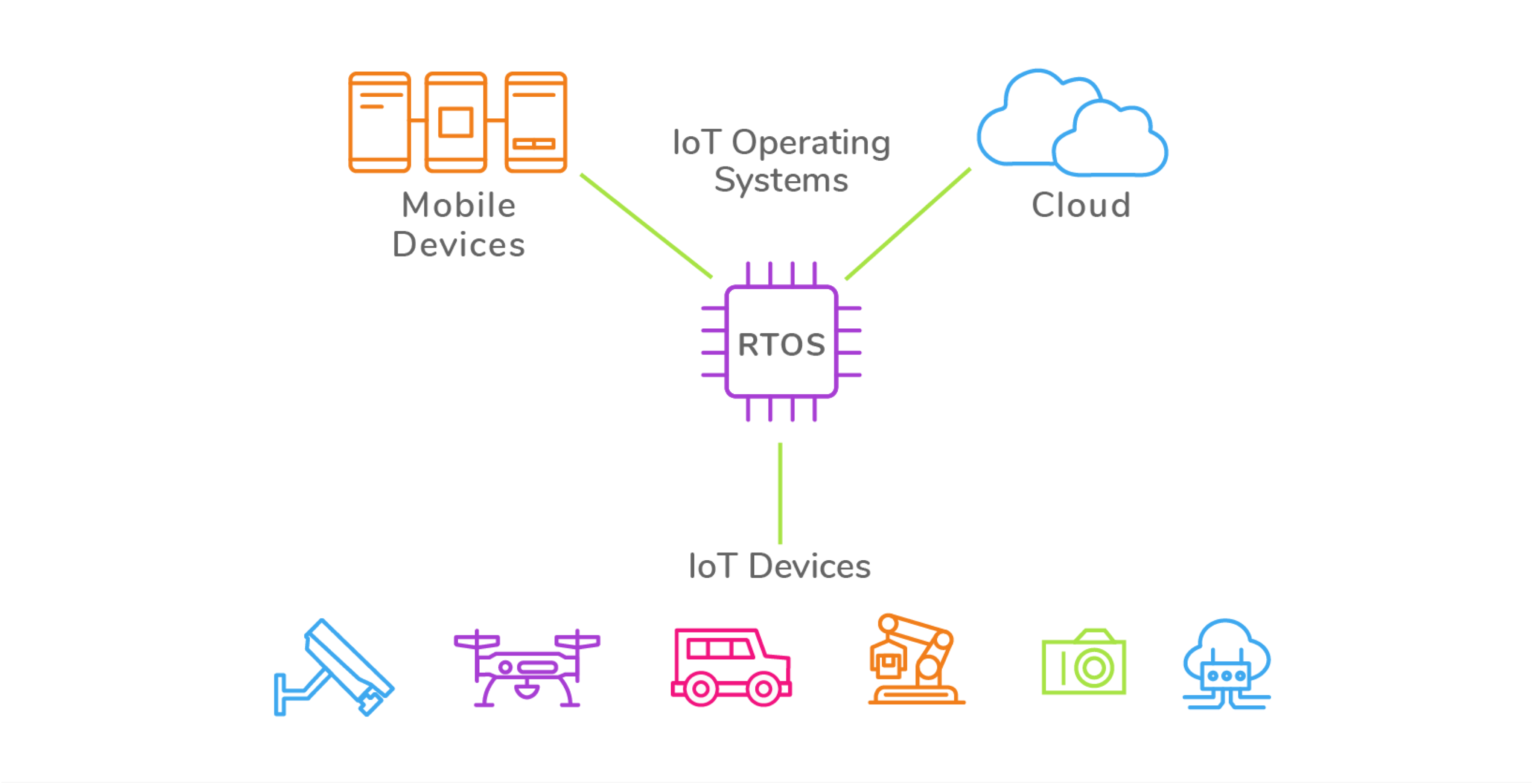
Real time operating systems are embedded in IoT devices—integrating software components that allow the programming of functionality in IoT devices as well as the processing capabilities needed to create a superior operating performance. IoT OS are designed to operate under strict constraints of IoT devices with limited memory and processing power.
IoT operating systems run and perform functions within IoT devices that are key for gathering and processing data to make business decisions in real time. IoT OS manages device hardware and software, driver updates, reconfiguration, and other resources (processing, memory, and storage). Also, these systems enable connection of devices to cloud services, machine learning applications, and other devices.
Embedded applications have hardware and software with dedicated purposes that interact with external events and require responses in real time.
Sensors and other IoT devices operate in many scenarios with specific demands and generate data that requires real-time processing with unique processes and flows. IoT devices generate data or events, triggering the operating system to execute tasks with well-defined purposes.
Real-Time Operating Systems are designed to run on small hardware such as microcontrollers (MCUs) and to build and execute the program (code) in real time. Data is processed as it comes, with almost no buffer delays, which works well with time-based tasks and priority task scheduling of specific jobs and deadlines (real-time scheduling functionality).
Building complex embedded applications works best using a real-time kernel set as a structure of independent tasks with no dependencies, executing one task at a time. Multitasking and inter-task communication features can switch between tasks in specific contexts, making it appear as if tasks are executing concurrently.
RTOS provides a deterministic execution pattern that responds to events within a defined time. The scheduler’s behavior is predictable as engineers assign and prioritize the threads of job execution (tasks). RTOS implementations add functionality with add-on components.
Application designers consider performance when choosing the type of RTOS and assign priorities to tasks, with hard real-time requirements executing ahead of soft requirements in order to meet deadlines most efficiently.
Most RTOS are open-source and permit modifications that suit individual use case applications. Thus, they can be deployed across your operations and devices.
RTOS Characteristics
• Predictable and deterministic (deadline oriented) execution pattern
• Fast task execution and consistent output
• Reliable and safe in critical situations
• Priority scheduling of operations tasks
• Extremely low latency
• Persistent uptime
• Small footprint
Types of RTOS
• Hard Real-Time System (HRTS). Hard Real-Time executes tasks at a specific scheduled time within an assigned duration (deadline); thus, breaches of deadlines result in system failure.
• Soft Real-Time System (SRTS). Soft Real-Time follows deadlines with a lower impact on system uses.
• Firm Real-Time System (FRTS). Firm Real-Time follows deadlines and accepts small time delays.
FreeRTOS™
Choosing an RTOS will depend on your project requirements. Systems are typically chosen based on simplicity, compatibility, and consistency. FreeRTOS is the most popular RTOS in the market.
FreeRTOS is the leading open-source commercial grade IoT OS for microcontrollers and microprocessors, a real-time kernel (real-time scheduler) that includes IoT libraries for use in many industries. FreeRTOS is free, fully supported, and documented, and it offers preconfigured demos and reference IoT integrations.
FreeRTOS is distributed under the MIT open-source license and maintained by AWS for the benefit of the community. Optional commercial licensing and support are also available.
FreeRTOS has integrated IDE and supports many MCU architectures and toolchains, modular libraries, and cloud connectivity. It can also be ported to different microcontroller architectures.
Some of the most relevant features of FreeRTOS include the flexibility to prioritize and assign tasks with multi-tasking capabilities. Some benefits of writing embedded software using a kernel are the abstraction of timing capabilities as well as fewer interdependencies of modules (tasks), providing a more controlled and predictable evolution.
FreeRTOS runs tasks as independent modules with few dependencies, allowing code reusability and testing in task isolation as well as a fast and flexible notification mechanism.
Developing event-driven embedded applications is more efficient, as they execute code only when there is an event, which helps avoid unnecessary processing time. In addition, applications can be designed to achieve continuous or periodic event-driven processing.
The scheduler creates an idle task run when there are no tasks to execute, which helps to measure processing capacity and background tests and puts the processor in low-power mode, thereby decreasing power consumption. Also, a tick-less mode that puts the processor in low-power mode for extreme low-power apps is available.
Krasamo Works with Key Technologies
C/C++
BLE Mesh

Linux
Embedded Wi-Fi
Board Support Package (BSP)
Flutter Apps

Rust (Language)

Dart
FreeRTOS
Serial Peripheral Interface (SPI)
Bluetooth/BLE
I²C I2C Protocol
C/C++
BLE Mesh
Board Support Package (BSP)
Rust (Language)
FreeRTOS
Bluetooth/BLE
Linux
Embedded Wi-Fi
Flutter Apps
Dart
Serial Peripheral Interface (SPI)
I²C I2C Protocol
Real time Operating Systems Related Services

IoT Development
Create tailored infrastructures for IoT products and operations, build IoT software designed for connectivity and interoperability, and maintain data-intensive IoT apps with algorithms to harness the power of data.
IoT Firmware Development
IoT Development Toolchains
IoT Device Management
IoT Data Analytics

IoT Testing Services
Firmware Porting
Considering an IoT project to connect objects (things)?
Krasamo has embedded software developers on staff who can build and validate a prototype and bring your
IoT devices to market.